Architecture Computational Technologies
Explore design research at the frontiers of architecture through experimentation in computational design, robotic systems applied to fabrication and interactivity, and materiality. For more information please contact ms.act@nyit.edu
MS_ACT INNOVATION KEYNOTE LECTURE Kaicong Wu
MS ACT Innovation Keynote Lecture
Tuesday May 31 2022 9am EDT
MS_ACT Master Of Science In Architecture, Computational Technologies
MS_ACT LECTURE SERIES Summer 2022
Informed actualizations: From AI to physical computation
The MS ACT Lecture Series aims at discussing research framed by invited guest speakers. The MS ACT Program focuses on architecture expanding relationships between science, technology and culture through innovation in algorithms, simulations, ai, robotics, robotic fabrication and materials. The spring 2022 lecture series discusses alternative means to understand the dialectics between the ideal digital and the physical digital. Within an architecture of information, AI, robotics and materials are thought as actualization interfaces. This process understands information flows and their actualizations as architecture.
MS_ACT INNOVATION KEYNOTE LECTURE
Introduction and Moderation:
Pablo Lorenzo-Eiroa, Director, MS ACT, New York Institute of Technology-SoAD
Presentation:
Kaicong Wu,
Assistant Professor, The University of Hong Kong (HKU)
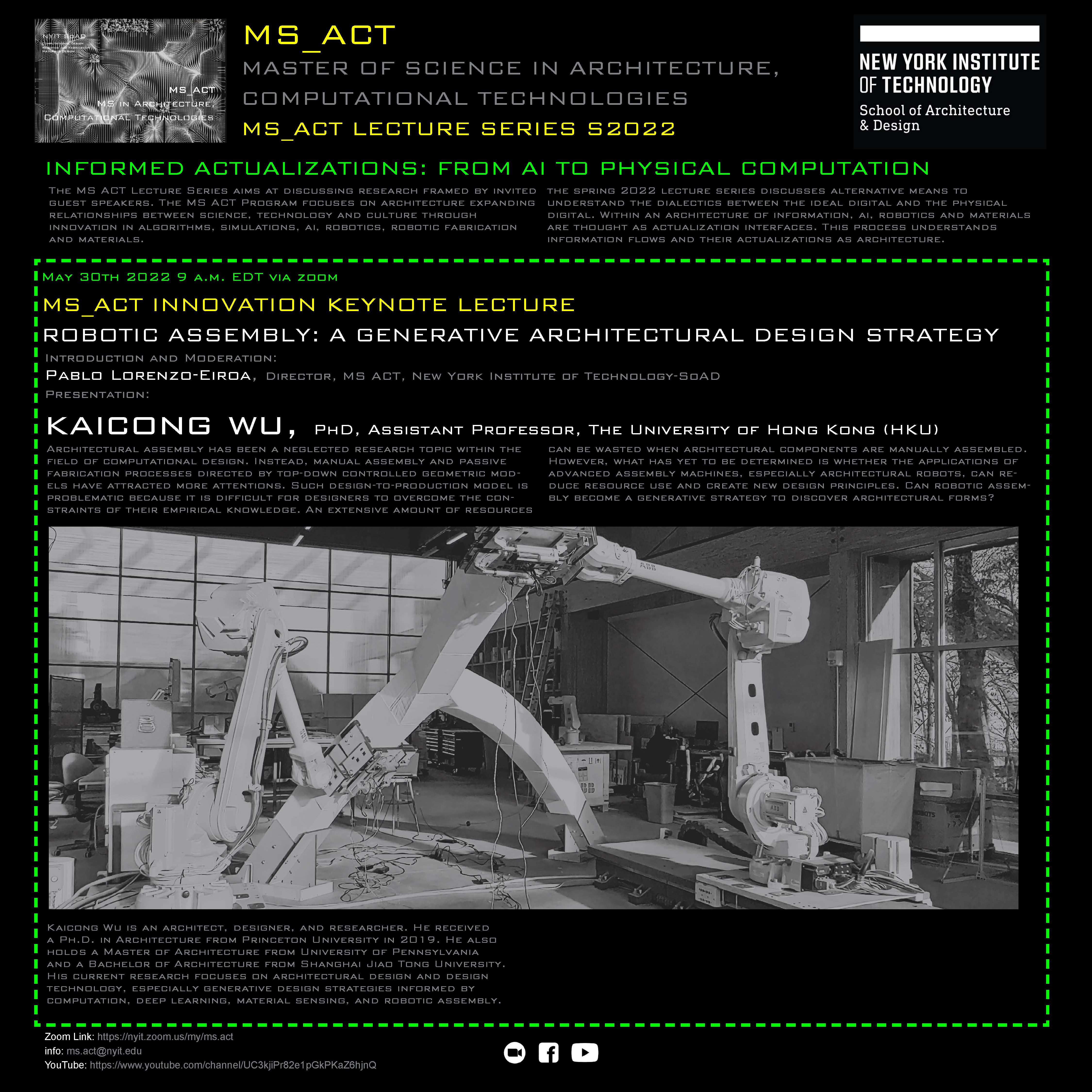
Robotic Assembly: A Generative Architectural Design Strategy
Architectural assembly has been a neglected research topic within the field of computational design. Instead, manual assembly and passive fabrication processes directed by top-down controlled geometric models have attracted more attentions. Such design-to-production model is problematic because it is difficult for designers to overcome the constraints of their empirical knowledge. An extensive amount of resources can be wasted when architectural components are manually assembled. However, what has yet to be determined is whether the applications of advanced assembly machines, especially architectural robots, can reduce resource use and create new design principles. Can robotic assembly become a generative strategy to discover architectural forms?
Kaicong Wu is an architect, designer, and researcher. He received a Ph.D. in Architecture from Princeton University in 2019. He also holds a Master of Architecture from University of Pennsylvania and a Bachelor of Architecture from Shanghai Jiao Tong University. His current research focuses on architectural design and design technology, especially generative design strategies informed by computation, deep learning, material sensing, and robotic assembly.
Zoom Link: https://nyit.zoom.us/my/ms.act
info: ms.act@nyit.edu
YouTube: https://www.youtube.com/channel/UC3kjiPr82e1pGkPKaZ6hjnQ
https://blogs.nyit.edu/msact
More Posts
All Posts